交流伺服驱动系统可以对伺服电机的位置、速度、转矩等进行控制,其调速范围宽、精度高、动态性能好,被广泛应用于工业生产中需要较高控制精度的领域。考虑到绕线机的自动排线机构不仅要满足跟随的快速性,还要满足跟随的精度要求,因此自动排线机构使用伺服系统进行驱动。
伺服系统的工作原理
1、伺服系统工作原理
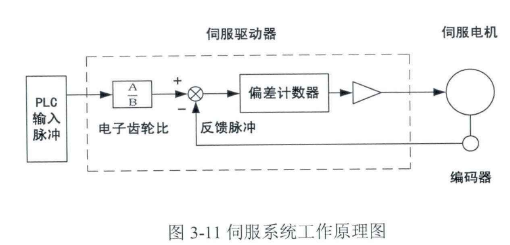
伺服驱动器作为伺服电机的驱动控制部件,与伺服电机组成一个完整的闭环伺服系统,如下图所示。伺服驱动器利用编码线反馈伺服电机的脉冲数,并与设定的数目进行比较,利用两者的偏差校正伺服电机的位置,提高了伺服电机定位的精度。同时伺服驱动器能够接收PLC的输入脉冲,并将该脉冲处理后输出给伺服电机,从而实现了 PLC对伺服电机的控制。
2、伺服系统的性能介绍
考虑到系统对于伺服电机功率和精度的要求,绕线机排线机构选择进口小惯量伺服电机,伺服驱动器选择与之配套的品牌。
伺服电机的基本规格及性能:输入电压为三相AC200V~230V或单相AC230V,输入频率为50/60HZ;适用于0.2KW的伺服电机;位置信号的3种输入方式分别为脉冲+方向、正转脉冲串+反转脉冲串和相位差为90°的A/B相脉冲串;编码器分辨率为131072p/r。
伺服电机的主要技术参数:额定输出功率为0.2KW;额定输出转矩0.64Nm,最大输出转矩1.9Nm;额定转速为3000r/min。
3、电子齿轮比
电子齿轮比的作用是能够将PLC输出的单位脉冲所对应的机械位移量设定为任意值。
自动绕线机排线伺服控制原理
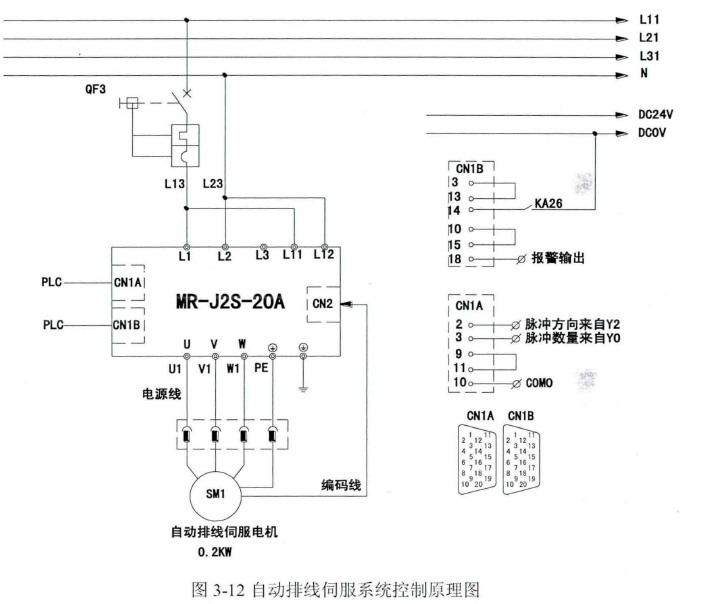
自动绕线机排线伺服控制原理如下图所示,包含主电路和端子控制电路两部分。
1、主电路
伺服驱动器的L1、L2端和L11、L12端都需要连接单相220V电源,对于型号为MR-J2S-100A以下的伺服驱动器,L3端可以不接,对于MR-J2S-100A以上的需要使用三相220V的电源。伺服驱动器的U、V和W端为伺服电机提供电源,CN2端通过编码线接收伺服电机的反馈信号实现闭环控制。
2、端子控制电路
不同公司的伺服驱动器的某些端子在不同的控制模式下实现的功能是不同的,绕线机的端子功能介绍均以控制模式为准。
(1)CNIA端子中的2号和3号端子分别为接收反转脉冲和正转脉冲端口。
伺服驱动器能够接收三种形式的脉冲,通过设定参数P21为0001将绕线机的脉冲接收形式设置为脉冲+方向,正逻辑。因此2号端子连接的是PLC的脉冲方向口 Y2,3号端子连接的是PLC的脉冲量输出口 Y0。
(2)CN1A的9号、10号和11号的连接方式适用于接收PLC发送的集电极开路的脉冲信号,其中9号端子为集电极端,与11号内部电源端连接,然后10号端子与PLC输出口 Y0和Y2的公共端COMO连接起来,经过这样的配置后,PLC发送的脉冲和方向信号才能被伺服驱动器识别。
(3)通过将CN1B端子中的3号内部电源端子和13号公共端连接起来为端子控制提供24V直流电源。
(4)CN1B的15号端子为强制停止端子,如果该端子与]0号公共端子断开,则伺服电机将被强制停止;该端子与10号公共端短路,则解除强制停止状态。
(5)CN1B的14号和18号端子分别为伺服驱动器的故障复位端和故障报警输出端。伺服驱动器发生故障时,驱动器与电机之间的主电路断开,动态制动器开始动作,伺服电机立即停止运行;同时PLC接收到伺服驱动器故障报警信号,控制外围主电路电源断开;报警原因排除后可通过复位端子使驱动器重新工作。
3、伺服系统的参数设置
绕线机排线机构伺服驱动器的参数设置如表3-2所示,部分参数说明如下:
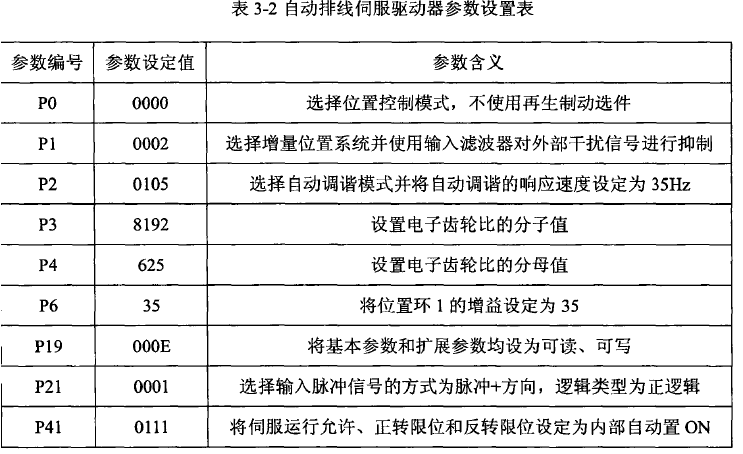
(1)参数P2。当机械发生振动或者齿轮声音大时应选择较小的响应速度,当需要缩短停止时的稳定时间,提高动态性能时应选择较大的响应速度。
(2)参数P6。该参数值设定的越大,对位置指令的执行误差就会越小,但是此值如果设定的太大容易引起机械振动,因此此参数值的设定应兼顾机械和对位置指令的跟踪。
(3)参数P41。该参数的作用是设定伺服运行允许,正转限位和反转限位为自动置ON模式。伺服驱动器的CN1B的5号端子是伺服运行允许端,只有在外部将5号端子和10号端子短路时,伺服电机才能正常运转。如果将伺服驱动器参数P41的值更改为"XXX1”,那么即使不进行外部连线,伺服电机也可以正常运转。CN1B的16号和17号端子分别是正转和反转限位,绕线机伺服电机的限位开关信号输入到PLC中,通过PLC程序控制伺服电机到达限位开关后的动作。如果伺服驱动器的16号和17号端子没有连接限位开关,运行时应将16号与10号、17号与10号分别短路,如果断开其中任何一组,伺服电机将急停并被锁定。通常的方法是将伺服驱动器参数P41的值设为“x11x”,那么在伺服驱动器内部会自动将16号与10号、17号与10号分别短路,从而无需进行外部连线。
 精密平行绕线机
精密平行绕线机 精密环型绕线机
精密环型绕线机 自动飞叉绕线机
自动飞叉绕线机 全自动设备系列
全自动设备系列 精密线圈
精密线圈 包胶线圈
包胶线圈 精密马达线圈
精密马达线圈 空芯线圈
空芯线圈 变压器线圈
变压器线圈